
シュトラール軍 宇宙用ヒューマノイド型無人邀撃機 Groβer Hund ALTAIR
- guide03



宇宙用の足は、サスペンション機構があり、キットのパーツは少々長めになっているので、足首の角度にあわせて少しずつ切断します。この際、軸受けとなる部分もφ2.0mmドリルで穴をあけておくとよりフィットします。ビニールコードを差し込む部分もこの時点でφ1.3〜1.5mmのドリルで開口しておいてください。


宇宙用の飛行形態で組む場合は、スパイクガードに角度をつけると雰囲気が出ます。
ビニールコードは短すぎず長すぎず、画像ぐらいの長さで。



地上用の足首に特に新設定はないんですが、上腕のようなディテールUPをしてもアリかと。外側と同径の穴を貫通させますが、ズレるとよくないので、徐々に開口。貫通させたら、径の合うお好みのオプションパーツを選び、接着せずにはめ込んで、いい位置になったら瞬着を流し込みます。
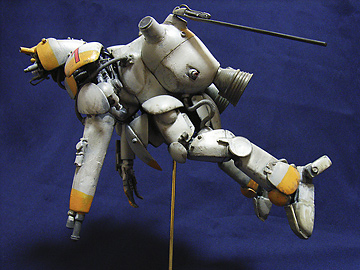

足首以外の脚は宇宙/地上共通ですので、地上用のモデリングガイドを参照してください。宇宙用は飛行形態、着陸姿勢で接続角度が異なります。参考にオリジナルモデルの側面画像を。飛行形態は股間パーツの中央に真ちゅう線を深めに差し込み、厚めの飾り台(各自ご用意ください)に固定してください。